Learning-Based Reward Functions for Improved Autonomous Navigation in Confined Terrains
Note: Due to ongoing research and pending publication, certain technical details and results have been intentionally omitted from this page.
Technologies & Tools
Project Images
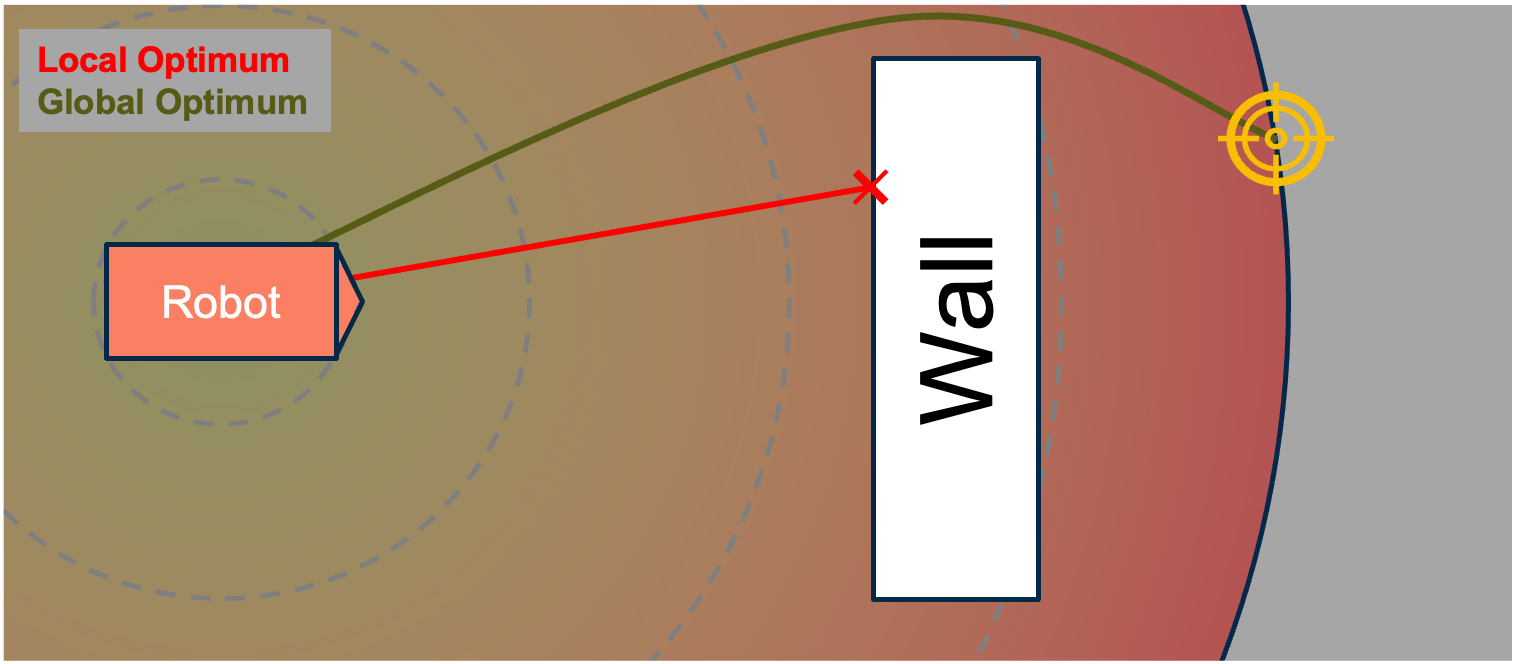
Potentially misleading l2 reward scenario for conventional planning
methods: Direct optimization of the L2 distance to the goal can lead to
undesired behavior, such as getting stuck in local minima or colliding with obstacles.
Rollout of the gradient-based planner on challenging terrain on the ANYmal robot platform in IsaacLab.
Results & Outcomes
Expected Impact: This work presents a promising new perspective on planning and navigation challenges in robotics. Future directions include generalizing the approach across diverse scenarios through large-scale dataset generation in IsaacSim. If successfully generalized, this optimization-based approach could significantly advance autonomous navigation capabilities in complex, dynamic environments.