
Fabio Hübel
Robotics, Control and ML Engineer
Hi! I am Fabio, a passionate engineer specializing in robotics, control systems, and machine learning. My foundation in Cybernetic Engineering supplied me with a robust understanding of control theory, which I am now intersecting with ML methods. Currently, my studies in robotics focus on learning world models and applying control-theoretic approaches to Reinforcement Learning (RL). I have a particular interest in mobile robotics and autonomous navigation. On this webpage, you'll find a collection of projects that highlight my engineering, programming, and problem-solving skills. Feel free to explore and reach out if you'd like to collaborate!
Featured Projects
Description: Advancing autonomous mobile navigation for quadrupedal robots on search-and-rescue missions at Autonomous System's Lab, Stanford University. Research focuses on integrating VLA models to bridge high-level perception and low-level dynamic control.
📂 View Project →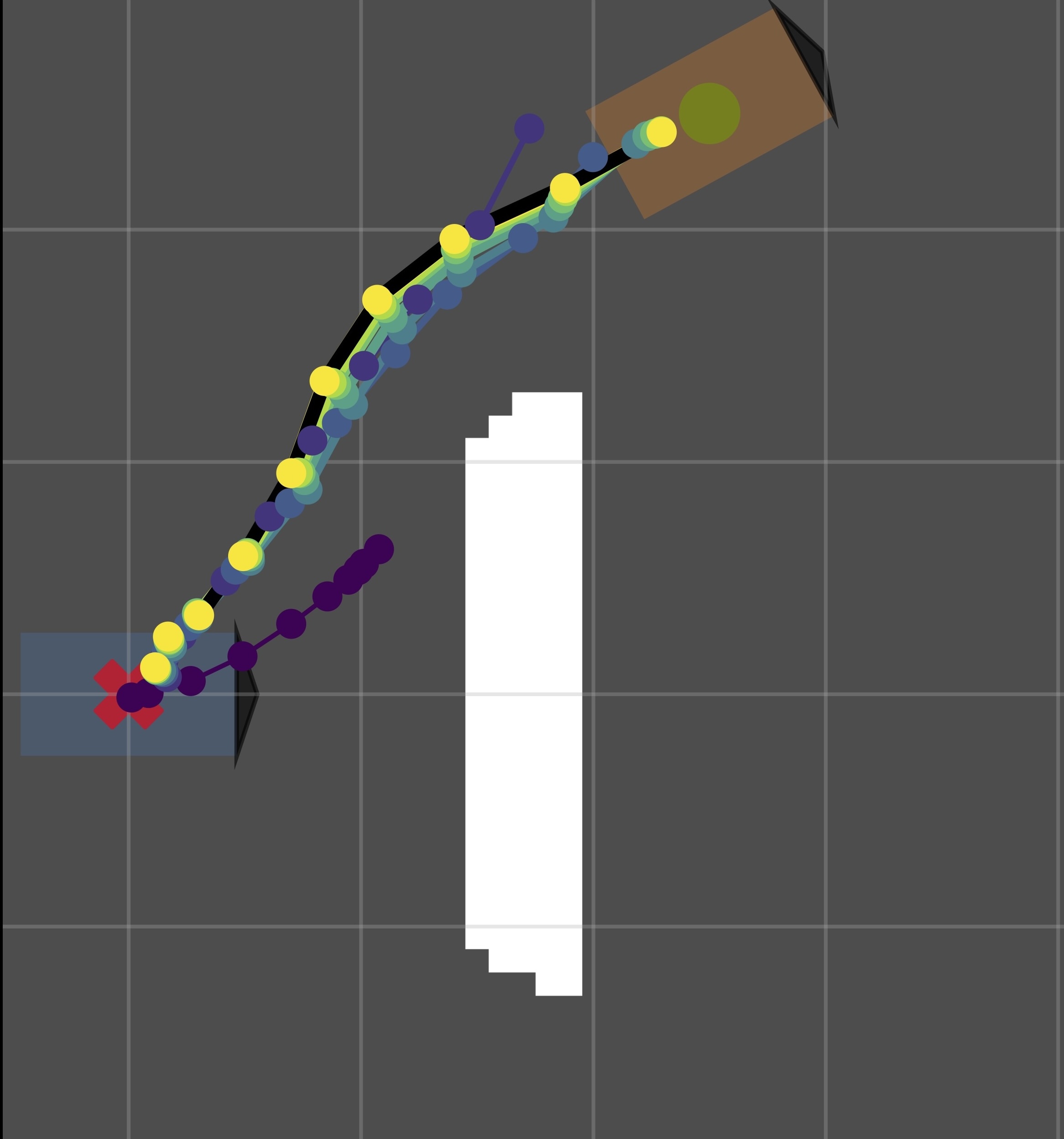
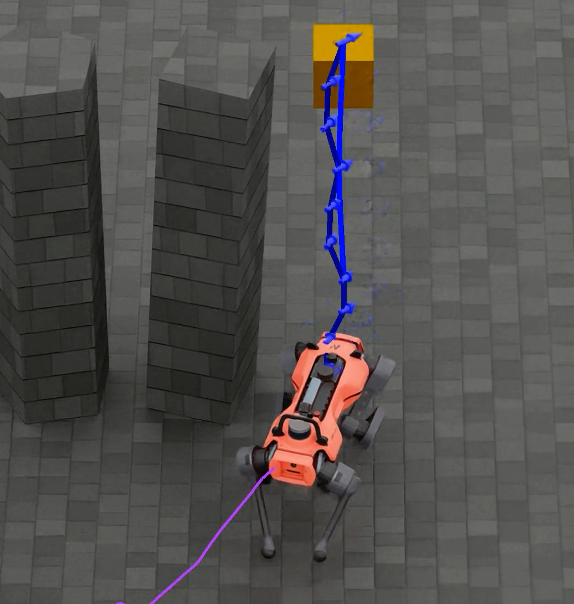
Description: Developing a learning-based path planning approach for ANYmal (robotic quadruped) using a gradient path planner leveraging a learned forward dynamics model. Continuation of "Perception and Learning for Robotics" course project at RSL, ETH Zürich.
📂 View Project →
Description: Deploying and adapting the TD-MPC2 algorithm for autonomous drone racing. We beat Dreamer-V3 in terms of sample efficiency on state-based drone racing. Currently, we are looking into extensions of the TD-MPC2 algorithm to further improve sample efficiency and enable more complex RL tasks.
📂 View Project →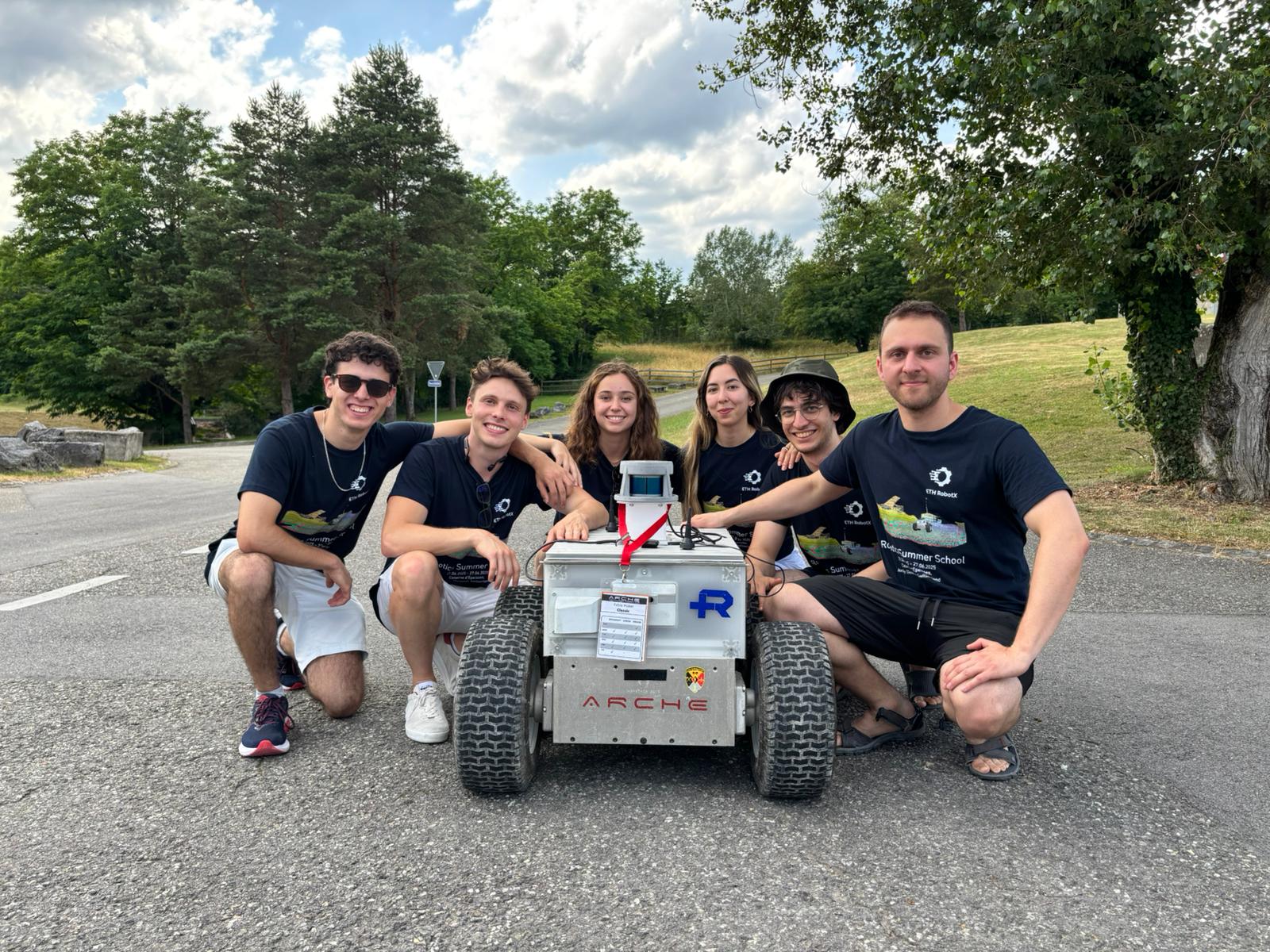
Description: Participated in and won the ETH RobotX Summer School Challenge of deploying a modular, fully autonomous exploration pipeline for a rover robot.
📂 View Project →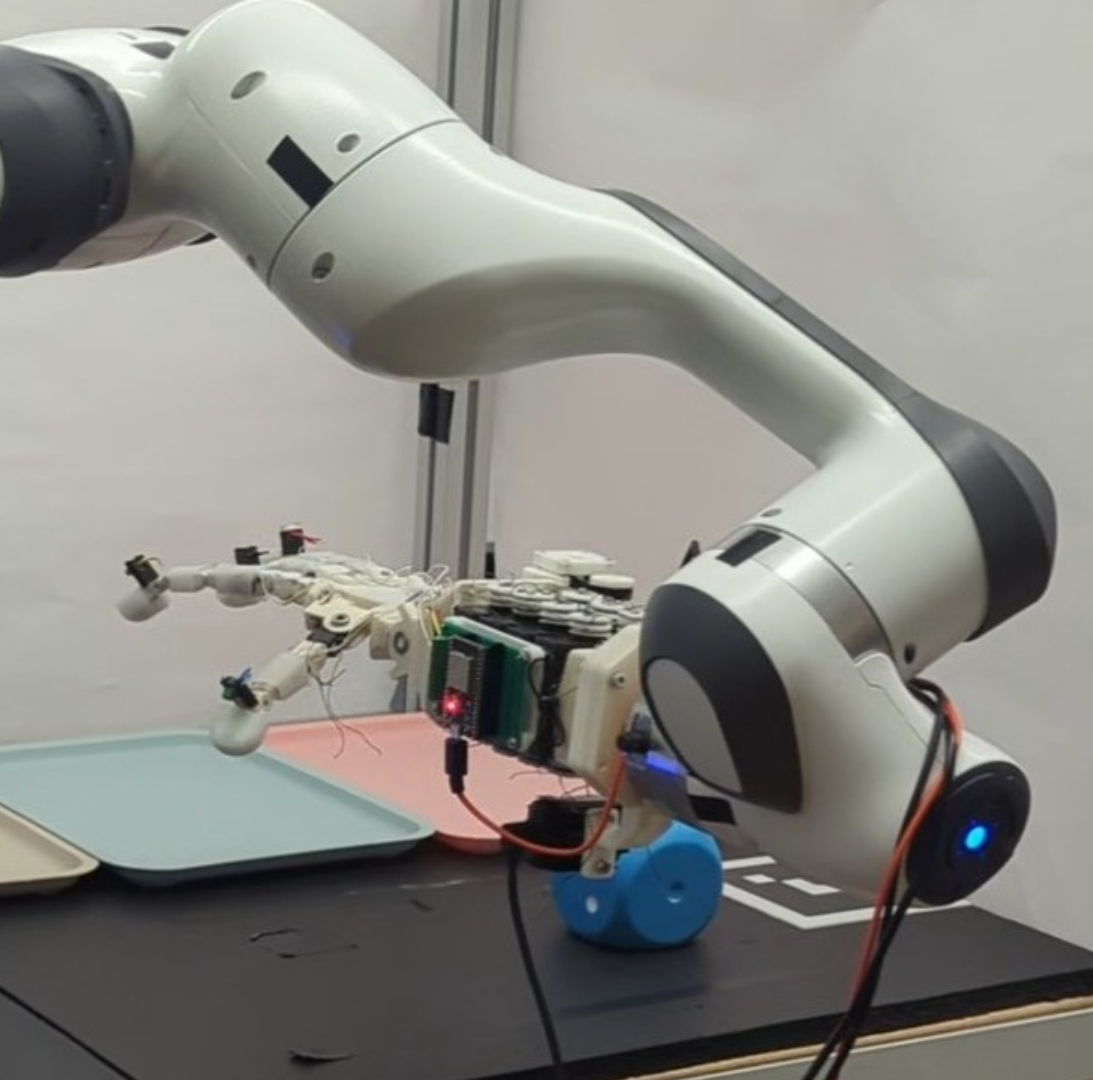
Description: Design, Control, Simulation and Behavioral Cloning / Imitation Learning on a Dexterous Tendon-driven Robotic Hand as part of a project lecture at SRL, ETH Zürich.
📂 View Project →Get In Touch
I'm always interested in new opportunities and collaborations. Feel free to reach out!