Real World Robotics
Technologies & Tools
Project Gallery
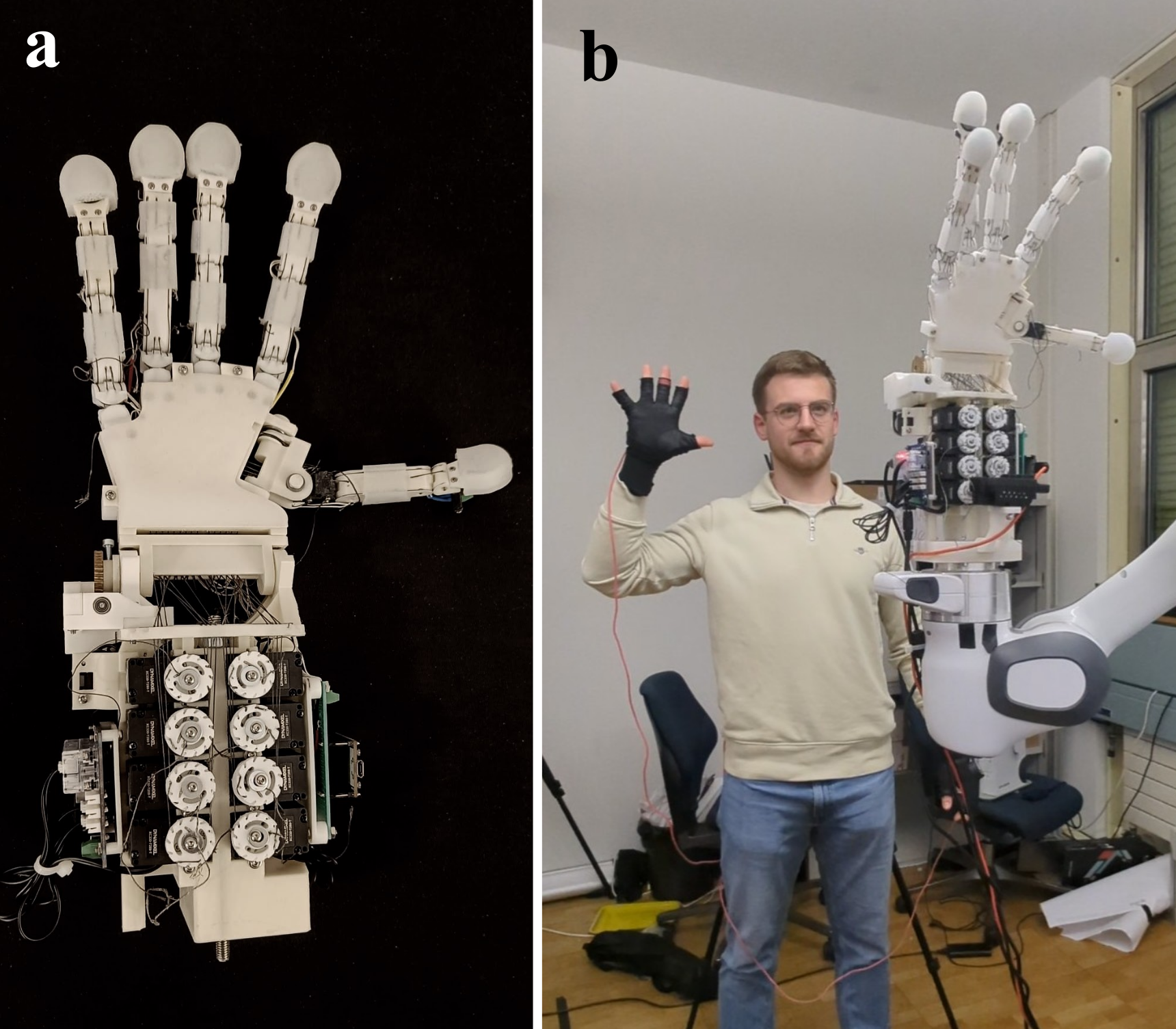
b: Robotic Hand in teleoperation
Results & Impact
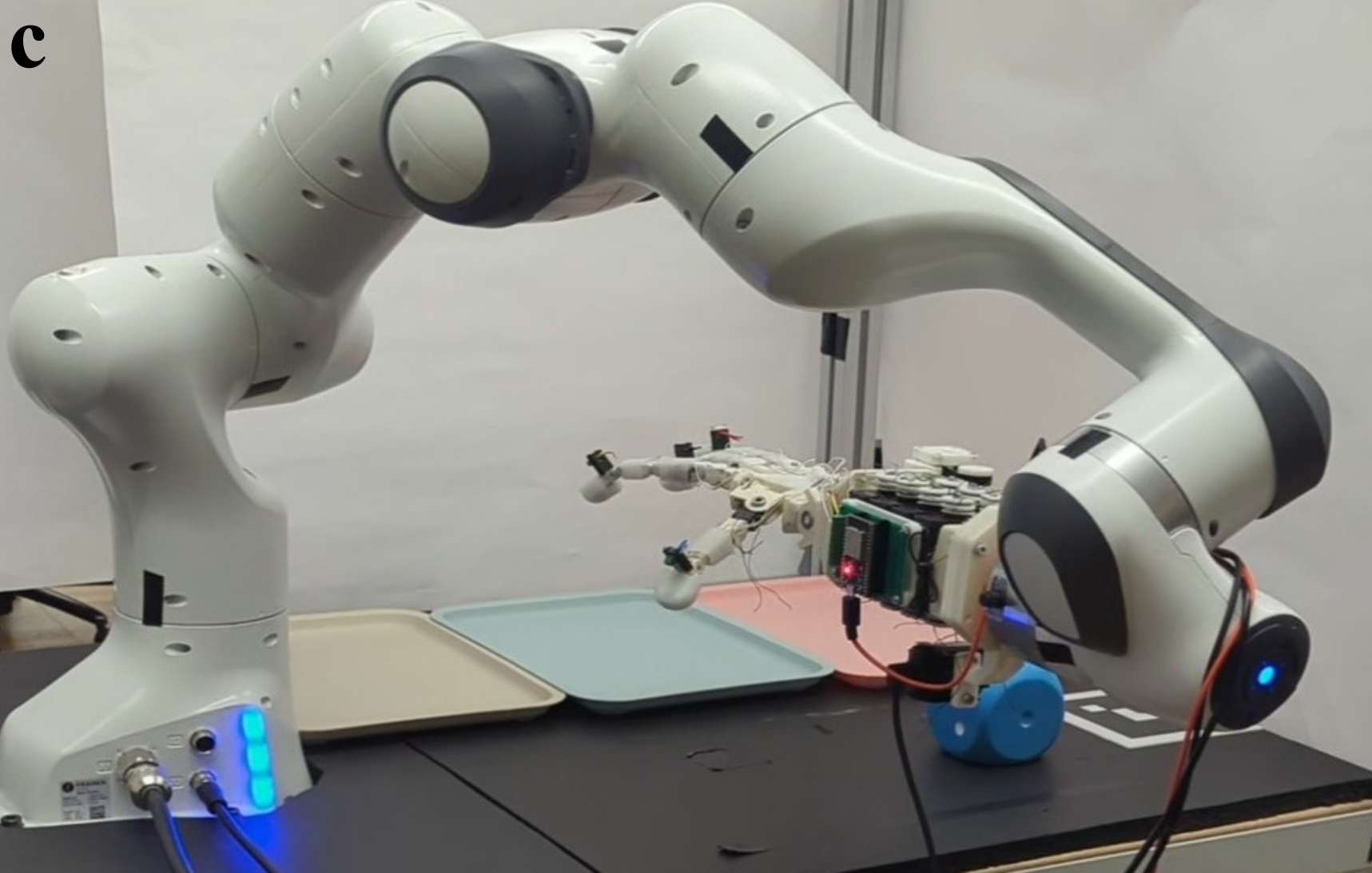
Results: The system demonstrated improved data collection efficiency and successfully enabled training of an autonomous color-based cube sorting policy deployed on a FRANKA manipulator. The retargeting system achieved real-time performance and high precision, while the custom force sensors achieved sensitivity down to 49mN, enabling detection of light touches crucial for manipulation tasks.
Impact: This work lowers the barrier to entry for imitation learning research by providing an affordable, capable platform for collecting expert demonstrations. The modular design and open architecture enable adaptation to various manipulation tasks and research applications. The improved data collection efficiency and quality directly translates to faster iteration cycles and better performing learned policies.